
Tin tức
 Trang chủ / Tin tức / Tin tức trong ngành / Làm thế nào có thể tối ưu hóa tốc độ quay và độ chính xác của các nền tảng quay rỗng cho các ứng dụng chính xác cao?
Trang chủ / Tin tức / Tin tức trong ngành / Làm thế nào có thể tối ưu hóa tốc độ quay và độ chính xác của các nền tảng quay rỗng cho các ứng dụng chính xác cao? Làm thế nào có thể tối ưu hóa tốc độ quay và độ chính xác của các nền tảng quay rỗng cho các ứng dụng chính xác cao?
 2025.04.18
2025.04.18
 Tin tức trong ngành
Tin tức trong ngành
Tối ưu hóa tốc độ quay và độ chính xác của Nền tảng quay rỗng Đối với các ứng dụng có độ chính xác cao đòi hỏi sự chú ý đến một số yếu tố thiết kế và kỹ thuật. Đây là cách bạn có thể đạt được tối ưu hóa này:
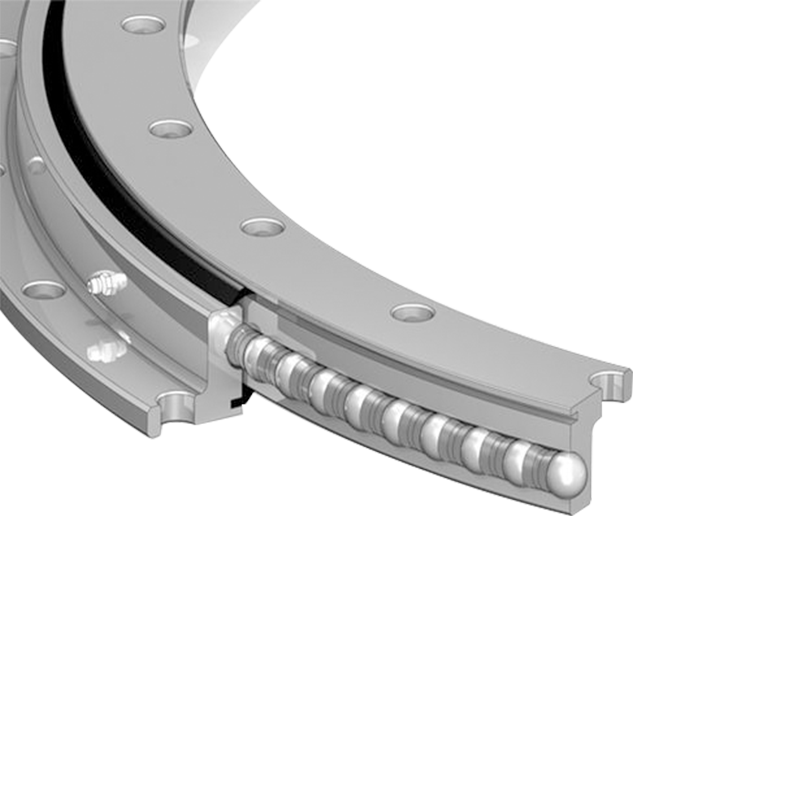
1. Vòng bi chính xác
-
Vòng bi chất lượng cao: Việc lựa chọn vòng bi chính xác là rất quan trọng trong việc giảm thiểu ma sát và đảm bảo xoay vòng trơn tru. Vòng bi gốm hoặc lai, được làm từ sự kết hợp của gốm và thép, cung cấp độ chính xác vượt trội, giảm hao mòn và khả năng tốc độ cao hơn so với vòng bi kim loại truyền thống.
-
Vòng bi trước: Áp dụng preload cho vòng bi có thể giảm thiểu chơi trục và cải thiện tính ổn định của nền tảng. Điều này cũng giúp đạt được chuyển động chính xác hơn, đặc biệt là ở tốc độ quay cao hơn.
2. Hệ thống ổ đĩa
-
Động cơ servo: Đối với các ứng dụng yêu cầu độ chính xác cao, sử dụng động cơ servo hoặc động cơ bước có thể cung cấp kiểm soát chính xác hơn về tốc độ quay và định vị. Những động cơ này có khả năng điều chỉnh tốt và tốc độ quay nhất quán, điều này rất cần thiết trong các nhiệm vụ có độ chính xác cao.
-
Hệ thống điều khiển vòng kín: Một hệ thống điều khiển vòng kín liên tục theo dõi và điều chỉnh tốc độ động cơ có thể duy trì tốc độ quay mong muốn ngay cả dưới các tải trọng khác nhau. Điều này đảm bảo độ chính xác nhất quán trong suốt hoạt động của nền tảng.
-
Hộp số hoặc hệ thống bánh răng giảm: Nếu nền tảng quay cần xoay ở tốc độ chậm hơn nhưng với mô -men xoắn và độ chính xác cao, việc tích hợp hộp số với tỷ lệ giảm thích hợp có thể cho phép kiểm soát tốt tốc độ quay và độ chính xác của vị trí.
3. Phản hồi và cảm biến
-
Bộ mã hóa: Bộ mã hóa quang học hoặc từ tính độ phân giải cao cung cấp phản hồi về vị trí và tốc độ của nền tảng quay, cho phép điều chỉnh thời gian thực để duy trì độ chính xác. Các bộ mã hóa này có thể phát hiện các thay đổi phút về vị trí và tốc độ, cho phép tinh chỉnh hiệu suất của nền tảng.
-
Biến áp vi phân biến tuyến tính (LVDT): Đối với các ứng dụng cực kỳ chính xác, LVDT có thể được sử dụng để theo dõi bất kỳ sự thay đổi nào về vị trí hoặc chuyển động của nền tảng. Các cảm biến này có thể cung cấp phản hồi cấp Micron phụ về vòng quay của nền tảng.
-
Hệ thống phản hồi vòng kín: Các hệ thống này, được tích hợp với động cơ và bộ mã hóa, cho phép điều chỉnh liên tục để đảm bảo rằng tốc độ và vị trí quay được duy trì với độ chính xác cao trong suốt hoạt động.
4. Thiết kế kết cấu và lựa chọn vật liệu
-
Vật liệu có trọng lượng thấp và cường độ cao: Việc sử dụng các vật liệu như hợp kim nhôm, sợi carbon hoặc kim loại nhẹ cho cấu trúc nền tảng giúp giảm quán tính, có thể cải thiện cả tốc độ và độ chính xác. Những vật liệu này cũng góp phần giảm rung và tăng cường phản ứng động trong quá trình xoay.
-
Giảm thiểu biến dạng: Đảm bảo tính toàn vẹn cấu trúc của nền tảng là điều cần thiết để duy trì độ chính xác. Sử dụng các vật liệu mạnh mẽ, cứng nhắc và thiết kế cẩn thận để giảm uốn cong hoặc cong vênh của nền tảng sẽ giảm thiểu bất kỳ nguồn lỗi tiềm ẩn nào trong quá trình xoay tốc độ cao.
5. Rung động ẩm
-
Hệ thống giảm xóc: Rung có thể là một yếu tố quan trọng ảnh hưởng đến độ chính xác, đặc biệt là ở tốc độ quay cao. Kết hợp các hệ thống giảm xóc, chẳng hạn như vật liệu nhớt, bộ cách ly rung hoặc thiết bị giảm xóc hoạt động, có thể làm giảm tác động của các rung động bên ngoài và dao động bên trong.
-
Cân bằng: Sự cân bằng đúng đắn của nền tảng là rất quan trọng, vì ngay cả sự mất cân bằng nhỏ cũng có thể dẫn đến những rung động làm suy giảm độ chính xác. Cân bằng động trong quá trình sản xuất đảm bảo rằng nền tảng hoạt động trơn tru ở tất cả các tốc độ quay.
6. Quản lý nhiệt
-
Hệ thống làm mát: Tốc độ quay cao có thể tạo ra nhiệt, có thể gây ra sự giãn nở nhiệt, ảnh hưởng đến độ chính xác. Sử dụng các hệ thống làm mát hoạt động (như quạt hoặc làm mát chất lỏng) hoặc kỹ thuật làm mát thụ động (như tản nhiệt) có thể ngăn chặn các hiệu ứng nhiệt ảnh hưởng đến hiệu suất của nền tảng.
-
Bồi thường nhiệt: Một số nền tảng quay chính xác cao được thiết kế với các vật liệu có hệ số giãn nở nhiệt thấp hoặc với các hệ thống có thể bù cho các thay đổi do nhiệt độ, đảm bảo rằng nền tảng duy trì độ chính xác ngay cả trong các điều kiện nhiệt độ khác nhau.
7. Kiểm soát phần mềm và thuật toán
-
Thuật toán điều khiển nâng cao: Việc thực hiện các thuật toán tinh vi điều chỉnh tốc độ động cơ, mô-men xoắn và vị trí động dựa trên phản hồi thời gian thực có thể tối ưu hóa tốc độ quay và đảm bảo điều khiển chính xác. Các thuật toán này giúp giảm lỗi do nhiễu, ma sát và biến thể tải bên ngoài.
-
Kiểm soát PID (Tỷ lệ tích hợp-Dailative-Dailative): Các vòng điều khiển PID tinh chỉnh có thể cung cấp kiểm soát tốt hơn về tốc độ và vị trí, sửa lỗi nhỏ trong thời gian thực và cải thiện độ chính xác tổng thể. Các hệ thống điều khiển này liên tục điều chỉnh các tham số để giảm thiểu lỗi giữa vòng quay mong muốn và thực tế.
8. Sự ổn định quay
-
Hiệu ứng con quay hồi chuyển: Tốc độ quay cao có thể gây ra các hiệu ứng con quay có thể ảnh hưởng đến độ chính xác của chuyển động. Chống lại các hiệu ứng này thông qua thiết kế (như sử dụng các đối thủ hoặc hệ thống ổn định) giúp duy trì độ ổn định và độ chính xác quay của nền tảng.
-
Cân bằng năng động: Thiết kế nền tảng quay rỗng phải đảm bảo rằng sự phân bố khối lượng được cân bằng, vì sự mất cân bằng có thể dẫn đến các lực ly tâm ảnh hưởng tiêu cực đến độ chính xác và hoạt động trơn tru ở tốc độ cao.
9. Bôi trơn
-
Hệ thống bôi trơn nâng cao: Bôi trơn thích hợp là điều cần thiết để giảm thiểu ma sát và hao mòn trên các thành phần di chuyển, đặc biệt là ở tốc độ quay cao. Sử dụng chất bôi trơn chất lượng cao và áp dụng chúng theo cách được kiểm soát (ví dụ: thông qua các hệ thống bôi trơn tự động) đảm bảo hiệu suất và tuổi thọ nhất quán.
-
Mỡ so với dầu: Đối với các ứng dụng tốc độ cao, việc chọn dầu bôi trơn phù hợp hoặc dầu mỡ dựa trên độ nhớt, độ ổn định nhiệt và khả năng tương thích với môi trường hoạt động là rất quan trọng để duy trì chuyển động mượt mà và chính xác.
10. Tích hợp với các hệ thống bên ngoài
-
Đồng bộ hóa với các thiết bị khác: Trong một số ứng dụng, các nền tảng quay rỗng có thể cần được đồng bộ hóa với các máy móc hoặc cánh tay robot khác. Đảm bảo khả năng tương thích và đồng bộ hóa với các hệ thống bên ngoài (như băng tải hoặc máy CNC) thông qua các giao thức giao tiếp hoặc điều khiển mạng giúp duy trì sự di chuyển và vận hành chính xác.

Công ty TNHH Công nghệ Truyền tải Jiangsu Manchen vượt trội trong việc tạo ra vòng bi tùy chỉnh, đáng tin cậy và chính xác cho các ngành công nghiệp đa dạng, liên tục đổi mới để đáp ứng các tiêu chuẩn cao nhất và tìm kiếm các cơ hội hợp tác. Nhà cung cấp vòng bi xoay đáng tin cậy và ổn định ở Trung Quốc.
Liên kết nhanh
Liên kết sản phẩm
Liên hệ với chúng tôi
-
Address:Số 8, Đường Nanqiu, Thị trấn Huangtu, Thành phố Jiangyin , Trung Quốc
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
